
Raspberry Pi
[Monitoring Camera System with Passive Infrared Sensor]
[Block Diagram]
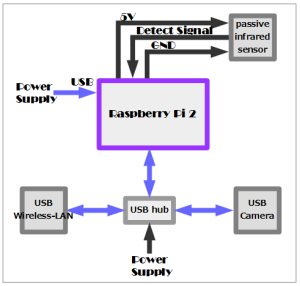
| Raspberry Pi2 | |
| USB power supply | KSY UB310-0520 |
| Case | |
| USB Camera | C270 |
| USB Wireless LAN | WLI-UC-G301N |
| USB hub | U2H-TZ420SBK |
| Passive infrared sensor | HC-SR501 |
| Jumper wire | female-female 10cmx3 |
[Functions]
- Pi detects a human by a passive infrared sensor.
- Pi records a movie for a while.
- Pi converts the recorded AVI file to Docomo 3gp file.
- Pi sends it to the mobile phone by email.
- Install OS to SD card. It needs 4.7GB totally in the end. SD card size should be 8GB or more.
Downloads the Raspbian image file from Raspberry Pi Foundation. Write it to the SD card by Win32DiskImager. - Power on with LAN cable, HDMI connection to TV, USB mouse and USB keyboard.
- You will see the Config dialog first. Select Expand Filesystem to expand SD card actual size.
- Change User Password.
- Select Internationalization Options for your location.
- Enable SSH in Advanced Options for the remote accress from your PC.
- Reboot by Finish.
- Check IP address at "inet addr" with ifconfig command.
- Install a terminal software like TeraTerm on your PC.
- Connect Pi with the IP address. Input default ID "pi" and password.
- Install vsftpd to check files on PC. Before the install, apt-get update and upgrade should be done.
pi@raspberrypi ~ $ sudo apt-get update (skip) pi@raspberrypi ~ $ sudo apt-get upgrade (skip) pi@raspberrypi ~ $ sudo apt-get install vsftpd (skip) - /etc/vsftpd.conf configration.
anonymous_enable=NO local_enable=YES write_enable=YES local_umask=022 ascii_upload_enable=YES ascii_download_enable=YES chroot_local_user=YES chroot_list_enable=YES chroot_list_file=/etc/vsftpd.chroot_list - Create /etc/vsftpd.chroot_list. Add only two characters "pi" in the file for the default user.
- restart and reboot.
pi@raspberrypi ~ $ sudo service vsftpd restart Stopping FTP server: vsftpd. Starting FTP server: vsftpd. pi@raspberrypi ~ $sudo reboot
- USB power supply from Raspberry Pi is not enough even though the USB power supply to Raspberry Pi is enough. USB camera should be connected through the USB hub with the another power supply. USB camera would be unstable when it is connected directly.
- Check connection by lsusb command
You may find the camera from these descriptions.Bus 001 Device 002: ID 0424:9514 Standard Microsystems Corp. Bus 001 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub Bus 001 Device 003: ID 0424:ec00 Standard Microsystems Corp. Bus 001 Device 004: ID 05e3:0608 Genesys Logic, Inc. USB-2.0 4-Port HUB Bus 001 Device 005: ID 1c4f:0027 SiGma Micro Bus 001 Device 006: ID 046d:0825 Logitech, Inc. Webcam C270 Bus 001 Device 007: ID 093a:2510 Pixart Imaging, Inc. Optical Mouse - Install fswebcam.
pi@raspberrypi ~ $ sudo apt-get install fswebcam (skip) - Capture an image by fswebcam.
No real problem about the message "Corrupt JPEG data".pi@raspberrypi ~ $ fswebcam test.jpg --- Opening /dev/video0... Trying source module v4l2... /dev/video0 opened. No input was specified, using the first. Adjusting resolution from 384x288 to 352x288. --- Capturing frame... Corrupt JPEG data: 1 extraneous bytes before marker 0xd6 Captured frame in 0.00 seconds. --- Processing captured image... Writing JPEG image to 'test.jpg'. - C270 outputs the following message at the second capture with an error but it disappeared by a reboot.
Unable to find a compatible palette format. - Check the image on PC with ftp software like FFFTP. (You can also check on Desktop on Raspberry Pi directly.)
- Connect through the USB hub. Check lsusb.
pi@raspberrypi ~ $ lsusb Bus 001 Device 002: ID 0424:9514 Standard Microsystems Corp. Bus 001 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub Bus 001 Device 003: ID 0424:ec00 Standard Microsystems Corp. Bus 001 Device 004: ID 05e3:0608 Genesys Logic, Inc. USB-2.0 4-Port HUB Bus 001 Device 005: ID 1c4f:0027 SiGma Micro Bus 001 Device 008: ID 0411:016f BUFFALO INC. (formerly MelCo., Inc.) WLI-UC-G301N Wireless LAN Adapter [Ralink RT3072] Bus 001 Device 006: ID 046d:0825 Logitech, Inc. Webcam C270 Bus 001 Device 007: ID 093a:2510 Pixart Imaging, Inc. Optical Mouse - Configure the WiFi software "wpa_supplicant". /etc/wpa_supplicant/wpa_supplicant.conf configuration. See official website.
ctrl_interface=DIR=/var/run/wpa_supplicant GROUP=netdev update_config=1 network={ ssid="WIFI network ID" #psk="xxxxxxxxxxxxxxx" psk=xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx proto=RSN key_mgmt=WPA-PSK pairwise=CCMP auth_alg=OPEN } - psk can be generated by the following command.
pi@raspberrypi ~ $ wpa_passphrase abcdef0123 abcdef0123 network={ ssid="abcdef0123" #psk="abcdef0123" psk=36dffc3bde1f01ef91d3ad5a92929b740abff208e6f09b69a09d345cde445d81 } - /etc/network/interfaces configration. See Debian Wiki.
auto wlan0 iface lo inet loopback iface eth0 inet dhcp allow-hotplug wlan0 iface wlan0 inet static address 192.168.1.xx netmask 255.255.255.0 gateway 192.168.1.1 dns-nameservers 192.168.1.1 wpa-conf /etc/wpa_supplicant/wpa_supplicant.conf - Reboot and check network connection.
- But, WiFi connection is not so stable for a long time. This method can not recover such disconnection. I uses wicd now. wicd is also written in Debian Wiki.
- OpenCV is Computer Vision library. It includes the interest libaries like a face detection but it requires very high speed processing. It was too slow on Raspberry Pi2. Now, I use OpenCV just for recording a movie. Install with the "Installation in Linux" on opencv.org. I removed some options like libtbb2 because they are not found.
pi@raspberrypi ~/opencv $ sudo apt-get install build-essential (skip) pi@raspberrypi ~/opencv $ sudo apt-get install cmake git libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev (skip) pi@raspberrypi ~/opencv $ sudo apt-get install python-dev python-numpy (skip) - Additionally, libv4l-dev also should be installed. It is not written in opencv.org but it is necessary.
pi@raspberrypi ~/opencv $ sudo apt-get install libv4l-dev (skip) - Get OpenCV source code.
pi@raspberrypi ~ $ git clone https://github.com/Itseez/opencv.git Cloning into 'opencv'... remote: Counting objects: 176319, done. remote: Compressing objects: 100% (6/6), done. remote: Total 176319 (delta 2), reused 2 (delta 2), pack-reused 176311 Receiving objects: 100% (176319/176319), 431.51 MiB | 3.20 MiB/s, done. Resolving deltas: 100% (119549/119549), done. Checking out files: 100% (4656/4656), done. - make "release" directory under the source code directory. run cmake.
The last words ".." means "parent directory". It does not mean "please take care by yourself though there are more arguments." I had misread...pi@raspberrypi ~/opencv $ mkdir release pi@raspberrypi ~/opencv $ cd release/ pi@raspberrypi ~/opencv/release $ cmake -D CMAKE_BUILD_TYPE=RELEASE -D CMAKE_INSTALL_PREFIX=/usr/local .. - My configuration result. There are many 'not found's but it is ok for this system.
-- General configuration for OpenCV 3.0.0-dev ===================================== -- Version control: 3.0.0-1-g424c2bd -- -- Platform: -- Host: Linux 3.18.11-v7+ armv7l -- CMake: 2.8.9 -- CMake generator: Unix Makefiles -- CMake build tool: /usr/bin/make -- Configuration: RELEASE -- -- C/C++: -- Built as dynamic libs?: YES -- C++ Compiler: /usr/bin/c++ (ver 4.6.3) -- C++ flags (Release): -fsigned-char -W -Wall -Werror=return-type -Werror=non-virtual-dtor -Werror=address -Werror=sequence-point -Wformat -Werror=format-security -Wmissing-declarations -Wundef -Winit-self -Wpointer-arith -Wshadow -Wsign-promo -fdiagnostics-show-option -pthread -fomit-frame-pointer -ffunction-sections -fvisibility=hidden -fvisibility-inlines-hidden -O3 -DNDEBUG -DNDEBUG -- C++ flags (Debug): -fsigned-char -W -Wall -Werror=return-type -Werror=non-virtual-dtor -Werror=address -Werror=sequence-point -Wformat -Werror=format-security -Wmissing-declarations -Wundef -Winit-self -Wpointer-arith -Wshadow -Wsign-promo -fdiagnostics-show-option -pthread -fomit-frame-pointer -ffunction-sections -fvisibility=hidden -fvisibility-inlines-hidden -g -O0 -DDEBUG -D_DEBUG -- C Compiler: /usr/bin/gcc -- C flags (Release): -fsigned-char -W -Wall -Werror=return-type -Werror=non-virtual-dtor -Werror=address -Werror=sequence-point -Wformat -Werror=format-security -Wmissing-declarations -Wmissing-prototypes -Wstrict-prototypes -Wundef -Winit-self -Wpointer-arith -Wshadow -fdiagnostics-show-option -pthread -fomit-frame-pointer -ffunction-sections -fvisibility=hidden -O3 -DNDEBUG -DNDEBUG -- C flags (Debug): -fsigned-char -W -Wall -Werror=return-type -Werror=non-virtual-dtor -Werror=address -Werror=sequence-point -Wformat -Werror=format-security -Wmissing-declarations -Wmissing-prototypes -Wstrict-prototypes -Wundef -Winit-self -Wpointer-arith -Wshadow -fdiagnostics-show-option -pthread -fomit-frame-pointer -ffunction-sections -fvisibility=hidden -g -O0 -DDEBUG -D_DEBUG -- Linker flags (Release): -- Linker flags (Debug): -- Precompiled headers: YES -- Extra dependencies: dl m pthread rt -- 3rdparty dependencies: -- -- OpenCV modules: -- To be built: hal core flann imgproc ml photo video imgcodecs shape videoio highgui objdetect superres ts features2d calib3d stitching videostab python2 -- Disabled: world -- Disabled by dependency: - -- Unavailable: cudaarithm cudabgsegm cudacodec cudafeatures2d cudafilters cudaimgproc cudalegacy cudaobjdetect cudaoptflow cudastereo cudawarping cudev java python3 viz -- -- GUI: -- QT: NO -- GTK+ 2.x: YES (ver 2.24.10) -- GThread : YES (ver 2.40.0) -- GtkGlExt: NO -- OpenGL support: NO -- VTK support: NO -- -- Media I/O: -- ZLib: /usr/lib/arm-linux-gnueabihf/libz.so (ver 1.2.7) -- JPEG: libjpeg (ver 90) -- WEBP: build (ver 0.3.1) -- PNG: /usr/lib/arm-linux-gnueabihf/libpng.so (ver 1.2.49) -- TIFF: build (ver 42 - 4.0.2) -- JPEG 2000: build (ver 1.900.1) -- OpenEXR: build (ver 1.7.1) -- GDAL: NO -- -- Video I/O: -- DC1394 1.x: NO -- DC1394 2.x: NO -- FFMPEG: YES -- codec: YES (ver 54.35.0) -- format: YES (ver 54.20.4) -- util: YES (ver 52.3.0) -- swscale: YES (ver 2.1.1) -- resample: NO -- gentoo-style: YES -- GStreamer: NO -- OpenNI: NO -- OpenNI PrimeSensor Modules: NO -- OpenNI2: NO -- PvAPI: NO -- GigEVisionSDK: NO -- UniCap: NO -- UniCap ucil: NO -- V4L/V4L2: Using libv4l1 (ver 1.0.0) / libv4l2 (ver 1.0.0) -- XIMEA: NO -- Xine: NO -- gPhoto2: NO -- -- Other third-party libraries: -- Use IPP: NO -- Use Eigen: NO -- Use TBB: NO -- Use OpenMP: NO -- Use GCD NO -- Use Concurrency NO -- Use C=: NO -- Use pthreads for parallel for: -- YES -- Use Cuda: NO -- Use OpenCL: YES -- -- OpenCL: -- Version: dynamic -- Include path: /home/pi/opencv/3rdparty/include/opencl/1.2 -- Use AMDFFT: NO -- Use AMDBLAS: NO -- -- Python 2: -- Interpreter: /usr/bin/python2.7 (ver 2.7.3) -- Libraries: /usr/lib/libpython2.7.so (ver 2.7.3) -- numpy: /usr/lib/pymodules/python2.7/numpy/core/include (ver 1.6.2) -- packages path: lib/python2.7/dist-packages -- -- Python 3: -- Interpreter: /usr/bin/python3 (ver 3.2.3) -- -- Python (for build): /usr/bin/python2.7 -- -- Java: -- ant: NO -- JNI: NO -- Java wrappers: NO -- Java tests: NO -- -- Matlab: -- mex: NO -- -- Documentation: -- Doxygen: NO -- PlantUML: NO -- -- Tests and samples: -- Tests: YES -- Performance tests: YES -- C/C++ Examples: NO -- -- Install path: /usr/local -- -- cvconfig.h is in: /home/pi/opencv/release -- ----------------------------------------------------------------- - run make. It takes about 3 hours.
pi@raspberrypi ~/opencv/release $ make Scanning dependencies of target libtiff [ 0%] Building C object 3rdparty/libtiff/CMakeFiles/libtiff.dir/tif_aux.c.o . (skip) . [100%] Built target opencv_annotation - Install
pi@raspberrypi ~/opencv/release $ sudo make install (skip)
- Use it for codec conversion.
pi@raspberrypi ~ $ sudo apt-get install ffmpeg (skip)
- Passive infrared sensor is connected to VCC/GND and GPIO4 (pin number 7). I used eLinux-RPi Low-level peripherals for GPIO controls.
- Use daemon() to run this program for the monitoring system. The output directory is defined directly by chdir(). Use syslog() for logging. But, the daemon should be added at the end after all debugs.
- I added some dummy read of VideoCapture because some frames remain in somewhere and they will appear at the first frames in the next movie.
- No video capturing when the passive infrared sensor does not detect human for low power consumption. Loop with 100mS sleep. After human detection, record without sleep.
- The program code execution itself takes time. The loop rate is around 8fps. You can measure the loop time by cvGetTickCount function. Record AVI file with MP42 codec with 8fps.
- Convert AVI file to NTT Docomo 3gp file (this is not applicable for the other countries.) by ffmpeg (avconv). Send it by email script.
- Recording time is about 15 seconds. The next recording will be enable after the continuous one minute no detection considering the working near the door. Set the maximum number of movies for the unexpected infrared detections.
- The detection at morning and the detection at midnight will be ignored. It must be me.
- source code
#include <iostream> #include <string> #include <opencv2/core/core.hpp> #include <opencv2/highgui/highgui.hpp> #include <time.h> #include <sys/time.h> #include <sys/mman.h> #include <unistd.h> #include <fcntl.h> #include <syslog.h> #define BCM2708_PERI_BASE 0x3F000000 #define GPIO_BASE (BCM2708_PERI_BASE + 0x200000) /* GPIO controller */ #define PAGE_SIZE (4*1024) #define BLOCK_SIZE (4*1024) #define MOVIEFPS 8 #define MAXMOVIENUM 5 #define MOVIETIME 100 #define DETECTINT 600 using namespace std; using namespace cv; int mem_fd; void *gpio_map; // I/O access volatile unsigned *gpio; // GPIO setup macros. Always use INP_GPIO(x) before using OUT_GPIO(x) or SET_GPIO_ALT(x,y) #define INP_GPIO(g) *(gpio+((g)/10)) &= ~(7<<(((g)%10)*3)) #define OUT_GPIO(g) *(gpio+((g)/10)) |= (1<<(((g)%10)*3)) #define SET_GPIO_ALT(g,a) *(gpio+(((g)/10))) |= (((a)<=3?(a)+4:(a)==4?3:2)<<(((g)%10)*3)) #define GPIO_SET *(gpio+7) // sets bits which are 1 ignores bits which are 0 #define GPIO_CLR *(gpio+10) // clears bits which are 1 ignores bits which are 0 #define GET_GPIO(g) (*(gpio+13)&(1<<g)) // 0 if LOW, (1<<g) if HIGH #define GPIO_PULL *(gpio+37) // Pull up/pull down #define GPIO_PULLCLK0 *(gpio+38) // Pull up/pull down clock int movienumber; int timecount; bool rec; void setup_io(); int main(int argc, char *argv[]) { if (daemon(1,0) == -1) { syslog(LOG_USER|LOG_INFO,"failed to launch daemon.\n"); return -1; } VideoWriter outputVideo; char outfile[20]; char workcommand[150]; #ifdef DEBUG double ticFrequency; double processTime; int startTic; int stopTic; ticFrequency = cvGetTickFrequency(); #endif struct timespec wt={0,100000000}; // sleep time of main loop 100mS. struct tm *s_time; time_t the_time; chdir("/home/pi/cpp/humandetector"); // Movie output directory syslog(LOG_USER|LOG_INFO,"Start"); setup_io(); INP_GPIO(4); movienumber = 0; timecount = 0; rec = false; VideoCapture inputVideo(0); if (!inputVideo.isOpened()) { syslog(LOG_USER|LOG_INFO,"Could not open the input video.\n"); return -1; } Size S = Size((int) inputVideo.get(CV_CAP_PROP_FRAME_WIDTH), (int) inputVideo.get(CV_CAP_PROP_FRAME_HEIGHT)); Mat frame,clrframe; inputVideo >> clrframe; // Dummy read to start camera for (;;) { #ifdef DEBUG startTic = cvGetTickCount(); #endif if (rec){ inputVideo >> frame; if(!frame.empty()){ outputVideo << frame; } timecount++; if(timecount>MOVIETIME){ rec = false; outputVideo.release(); syslog(LOG_USER|LOG_INFO,"released. convert avi to 3gp."); sprintf(workcommand, "avconv -y -i %s -r:v 30 -codec:v mpeg4 -b:v 64k -s:v 320x240 -codec:a libaac -ar:a 48000 000.3gp", outfile); system(workcommand); syslog(LOG_USER|LOG_INFO,"send 3gp to docomo."); system("sh mymail.sh 000.3gp"); if(movienumber>=MAXMOVIENUM){break;} timecount=DETECTINT; syslog(LOG_USER|LOG_INFO,"done."); } }else if(GET_GPIO(4) > 0){ (void) time(&the_time); s_time=localtime(&the_time); if(timecount>0){ timecount=DETECTINT; }else if(s_time->tm_hour>=8 && s_time->tm_hour<=21){ rec = true; timecount=0; sprintf(outfile, "%03d.avi", movienumber++); outputVideo.open(outfile, CV_FOURCC('M', 'P', '4', '2'), MOVIEFPS, S, true); if (!outputVideo.isOpened()) { syslog(LOG_USER|LOG_INFO,"Could not open the output video."); return -1; } inputVideo >> clrframe; // Dummy reads to skip old cache. inputVideo >> clrframe; inputVideo >> clrframe; inputVideo >> clrframe; syslog(LOG_USER|LOG_INFO,"detected."); } }else{ nanosleep(&wt,NULL); if(timecount>0){timecount--;} } #ifdef DEBUG stopTic = cvGetTickCount(); processTime = (stopTic-startTic)/ticFrequency; printf("time=%fus\n",processTime); #endif } outputVideo.release(); inputVideo.release(); syslog(LOG_USER|LOG_INFO,"Finished."); return 0; } // // Set up a memory regions to access GPIO // void setup_io() { /* open /dev/mem */ if ((mem_fd = open("/dev/mem", O_RDWR|O_SYNC) ) < 0) { syslog(LOG_USER|LOG_INFO,"can't open /dev/mem "); exit(-1); } /* mmap GPIO */ gpio_map = mmap( NULL, //Any adddress in our space will do BLOCK_SIZE, //Map length PROT_READ|PROT_WRITE,// Enable reading & writting to mapped memory MAP_SHARED, //Shared with other processes mem_fd, //File to map GPIO_BASE //Offset to GPIO peripheral ); close(mem_fd); //No need to keep mem_fd open after mmap if (gpio_map == MAP_FAILED) { syslog(LOG_USER|LOG_INFO,"mmap error %d", (int)gpio_map);//errno also set! exit(-1); } // Always use volatile pointer! gpio = (volatile unsigned *)gpio_map; } // setup_io
- Create CMakeLists.txt for make.
cmake_minimum_required(VERSION 2.8) project( humandetector ) set(SOURCES humandetector.cpp) find_package( OpenCV REQUIRED ) add_executable( humandetector ${SOURCES} ) target_link_libraries( humandetector ${OpenCV_LIBS} ) - cmake
pi@raspberrypi ~/cpp/humandetector $ cmake . -- The C compiler identification is GNU 4.6.3 -- The CXX compiler identification is GNU 4.6.3 -- Check for working C compiler: /usr/bin/gcc -- Check for working C compiler: /usr/bin/gcc -- works -- Detecting C compiler ABI info -- Detecting C compiler ABI info - done -- Check for working CXX compiler: /usr/bin/c++ -- Check for working CXX compiler: /usr/bin/c++ -- works -- Detecting CXX compiler ABI info -- Detecting CXX compiler ABI info - done -- Configuring done -- Generating done -- Build files have been written to: /home/pi/cpp/humandetector - make
pi@raspberrypi ~/cpp/humandetector $ make Scanning dependencies of target humandetector [100%] Building CXX object CMakeFiles/humandetector.dir/humandetector.cpp.o Linking CXX executable humandetector [100%] Built target humandetector
- Install nkf.
pi@raspberrypi ~ $ sudo apt-get install nkf (skip) - Install ssmtp.
pi@raspberrypi ~ $ sudo apt-get install ssmtp (skip) - /etc/ssmtp/ssmtp.conf configration. Use Gmail. Do not deactivate Google 2 step verification. Use App Password to set AuthPass.
# # Config file for sSMTP sendmail # # The person who gets all mail for userids < 1000 # Make this empty to disable rewriting. root=xxxxx@gmail.com # The place where the mail goes. The actual machine name is required no # MX records are consulted. Commonly mailhosts are named mail.domain.com mailhub=smtp.gmail.com:587 AuthUser=xxxxx@gmail.com AuthPass=xxxxxxx AuthMethod=LOGIN UseSTARTTLS=YES UseTLS=Yes # Where will the mail seem to come from? #rewriteDomain= # The full hostname hostname=localhost # Are users allowed to set their own From: address? # YES - Allow the user to specify their own From: address # NO - Use the system generated From: address #FromLineOverride=YES - mymail.sh for sendmail script.
#!/bin/sh FILE=$1 NKF='/usr/bin/nkf' SENDMAIL='/usr/sbin/sendmail' TO='xxxxxxxx@docomo.ne.jp' FROM='xxxxxxx@gmail.com' BOUND=`date +"%Y%m%d%H%M%S"` Err(){ echo "$1">&2; exit 1; } Check_file(){ test -f $1 || return 1; return 0; } Msg() { echo "To:${TO} Subject: sendmail MIME-Version: 1.0 Content-Type: multipart/mixed; boundary=\"---------${BOUND}\" -----------${BOUND} Content-Type: Text/Plain; charset=ISO-2022-JP Content-Transfer-Encoding: 7bit from RasPi -----------${BOUND} Content-Type: application/octet-stream; name=\"${FILE}\" Content-Transfer-Encoding: base64 Content-Disposition: attachment; filename=\"${FILE}\" " | ${NKF} -j -m0 cat ${FILE} | base64 echo "" echo "-----------${BOUND}--" } ## main Check_file ${FILE} || Err "Warning : Cannot open ${FILE}" Msg | ${SENDMAIL} -f${FROM} ${TO} exit 0
- Create humandetector under /etc/init.d/. Comment sentences in INIT INFO are necessary for update-rc.d command later. /lib/lsb/init-functions is also necessary for status_of_proc command.
#! /bin/sh ### BEGIN INIT INFO # Provides: humandetector # Required-Start: $remote_fs $syslog # Required-Stop: $remote_fs $syslog # Default-Start: 2 3 4 5 # Default-Stop: 0 1 6 ### END INIT INFO PATH=/sbin:/usr/sbin:/bin:/usr/bin DESC="humandetector" NAME=humandetector DAEMON=/home/pi/cpp/humandetector/$NAME SCRIPTNAME=/etc/init.d/$NAME # Exit if the package is not installed [ -x "$DAEMON" ] || exit 0 # Define LSB log_* functions. # Depend on lsb-base (>= 3.2-14) to ensure that this file is present # and status_of_proc is working. . /lib/lsb/init-functions # # Function that starts the daemon/service # do_start() { # Return # 0 if daemon has been started # 1 if daemon was already running # 2 if daemon could not be started start-stop-daemon --start --quiet --exec $DAEMON --test > /dev/null \ || return 1 start-stop-daemon --start --quiet --exec $DAEMON \ || return 2 return 0 } # # Function that stops the daemon/service # do_stop() { # Return # 0 if daemon has been stopped # 1 if daemon was already stopped # 2 if daemon could not be stopped # other if a failure occurred start-stop-daemon --stop --quiet --name $NAME RETVAL="$?" return "$RETVAL" } case "$1" in start) do_start ;; stop) do_stop ;; status) status_of_proc "$DAEMON" "$NAME" && exit 0 || exit $? ;; *) echo "Usage: $SCRIPTNAME {start|stop|status}" >&2 exit 3 ;; esac : - Make link files by update-rc.d command. The link files will be created in /etc/rc0.d/~/etc/rc6.d/. After that, humandetector will run automatically after the boot.
pi@raspberrypi ~ $ sudo update-rc.d humandetector defaults update-rc.d: using dependency based boot sequencing pi@raspberrypi ~ $ ls /etc/rc[0-6].d/*humandetector* /etc/rc0.d/K01humandetector /etc/rc2.d/S02humandetector /etc/rc4.d/S02humandetector /etc/rc6.d/K01humandetector /etc/rc1.d/K01humandetector /etc/rc3.d/S02humandetector /etc/rc5.d/S02humandetector - service command can controll humandetector daemon.
pi@raspberrypi ~ $ sudo service humandetector start pi@raspberrypi ~ $ sudo service humandetector status [ ok ] humandetector is running. pi@raspberrypi ~ $ sudo service humandetector stop pi@raspberrypi ~ $ sudo service humandetector status [FAIL] humandetector is not running ... failed!